Specifications
Sensor Placement
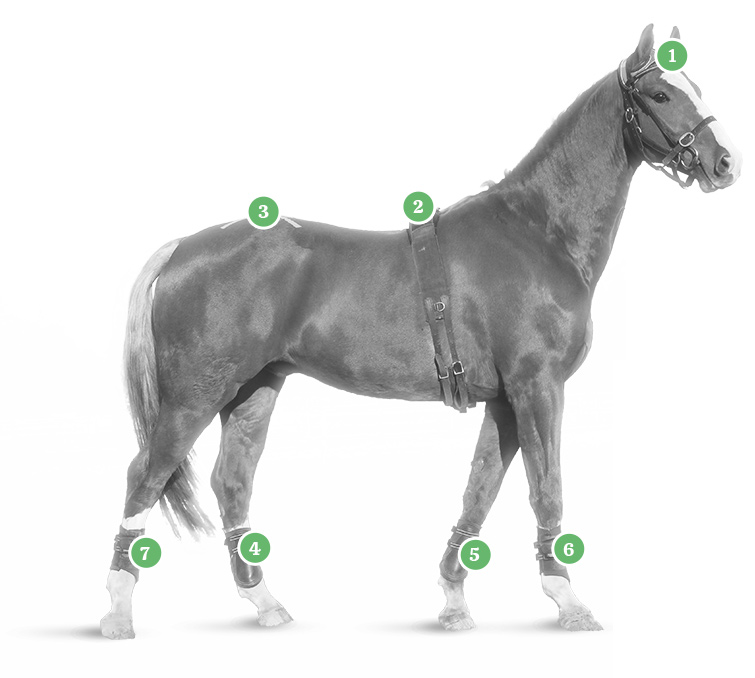
Placing sensors is a non-invasive procedure. The head sensor is fastened on the head with a custom-made holder. The sensor on the withers is attached with a surcingle. The sacrum sensor is easily stuck using double adhesive tape. The sensors on the cannon bones are placed in custom-made holsters fixed to brushing boots. The sensors do not disturb the normal movement pattern of the horse.
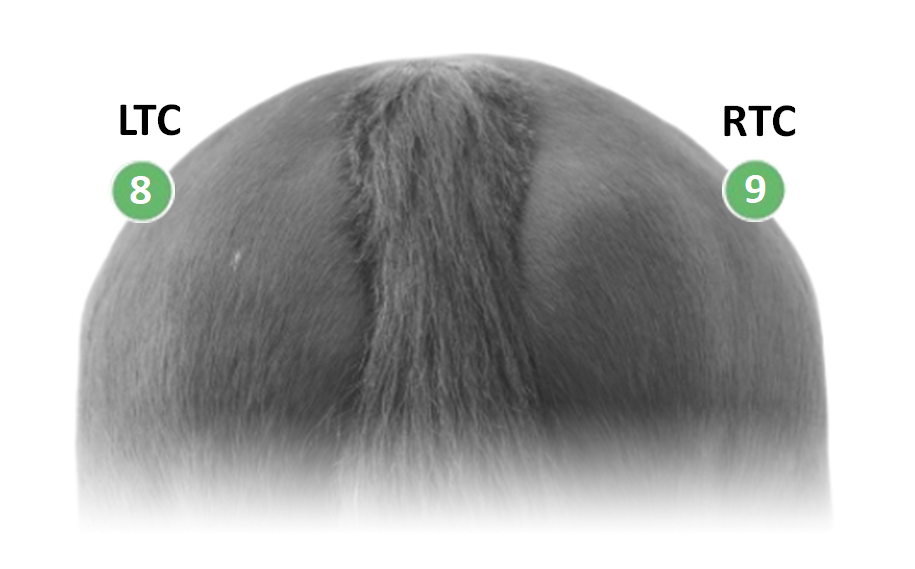
The standard setup consists of 7 sensors, placed on the head, withers, sacrum and the four legs. Two more sensors can be added to the left tuber-coxae (LTC) and right tuber-coxae (RTC) for the assessment of the complete movement of the pelvis.
- Head sensor
- Withers sensor
- Sacrum sensor
- Left hind leg sensor
- Left front leg sensor
- Right front leg sensor
- Right hind leg sensor
- Left tuber-coxae – LTC (optional)
- Right tuber-coxae – RTC (optional)
Optionally, a GNSS sensor can be used to retrieve the speed of the horse while performing the measurements. This sensor can replace the head, withers or sacrum sensor.
Characteristics
- What is measured: 3D acceleration, rotation speed, orientation
- How often: 200 times per second
- Synchronization among sensors: better than 100 ns
- Optional: measurement of horse speed
- Data quality check is done at the end of each trial.
Types of assessments
- In hand (including lunging)
- Ridden
- Driven
Types of examination gaits
- Walk
- Trot
- Canter (left-lead and right-lead)
- Tölt
- Pace
Upper-Body Parameters
The upper-body symmetry parameters are used to estimate to what extent the horse’s gait is symmetrical at key positions on the upper body of the horse. These parameters are based on vertical motion and displacement. At each of these positions, the horse’s body moves up and down in a cyclic fashion exactly two times each stride. In healthy horses, this signal is symmetrical.
Symmetry index
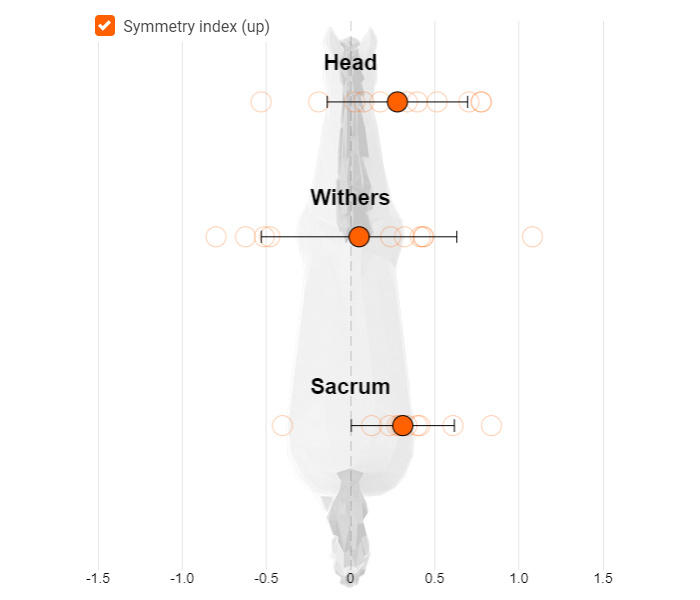
The symmetry index ranges from -1 to 1. A value of 0 indicates perfect symmetry. A value of ±1 indicates maximum asymmetry. The sign depends on the affected limb.
Hip-Hike
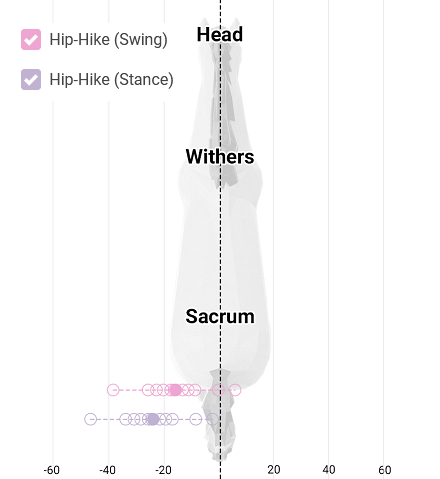
Hip-hike (optional) is a symmetry parameter that measures the difference in vertical displacement of the left and right tuber-coxae in both the swing and stance phases of the stride. It requires the LTC and RTC sensors on the left and right tuber-coxae. A value of 0 indicates a perfect symmetry.
Min__diff & Max__diff
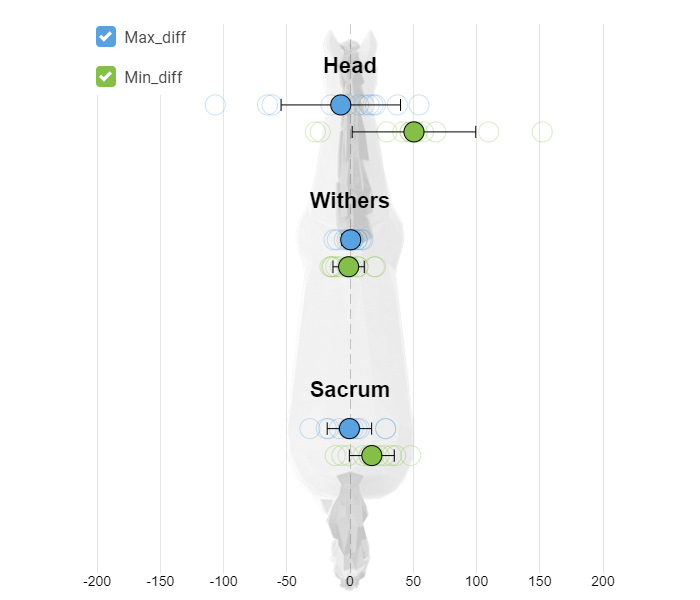
Min_diff is the difference between first and second minimum peaks in vertical displacement signal. Max_diff is the difference between first and second maximum peaks in vertical displacement signal. A value of 0 indicates perfect symmetry.
Limb-Related Parameters
Timing of footfalls
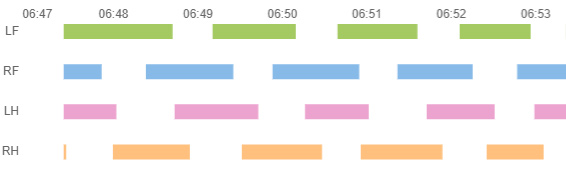
The timing of footfalls is the expression of rhythm, defined as the order of placing the hoofs on the ground in a complete stride.
Stride duration & Number of strides
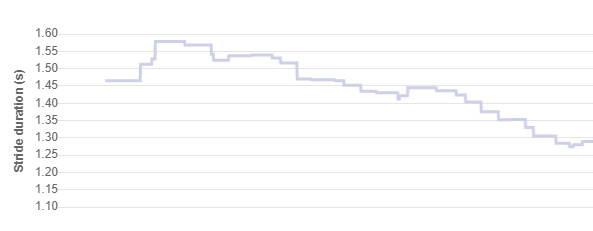
The stride duration is the time required to complete one stride. Stride duration is the inverse of tempo, defined as the number of strides per minute.
The number of strides is the total number of strides during one trial.
Swing intensity
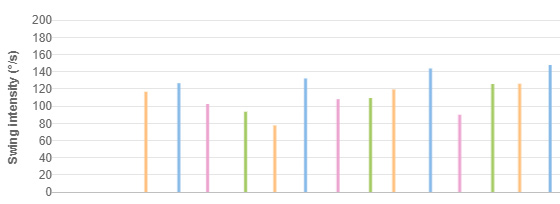
The swing intensity is the range of motion of one stride (protraction & retraction) and it is used for expressing the moments of impact and the beats per leg.
The time differences on the X-axis of the graph for the lateral advanced placement and the diagonal advanced placement show differences for instance between a four-beat ‘canter’ and a proper 3-beat canter.
Stance & Swing duration per leg
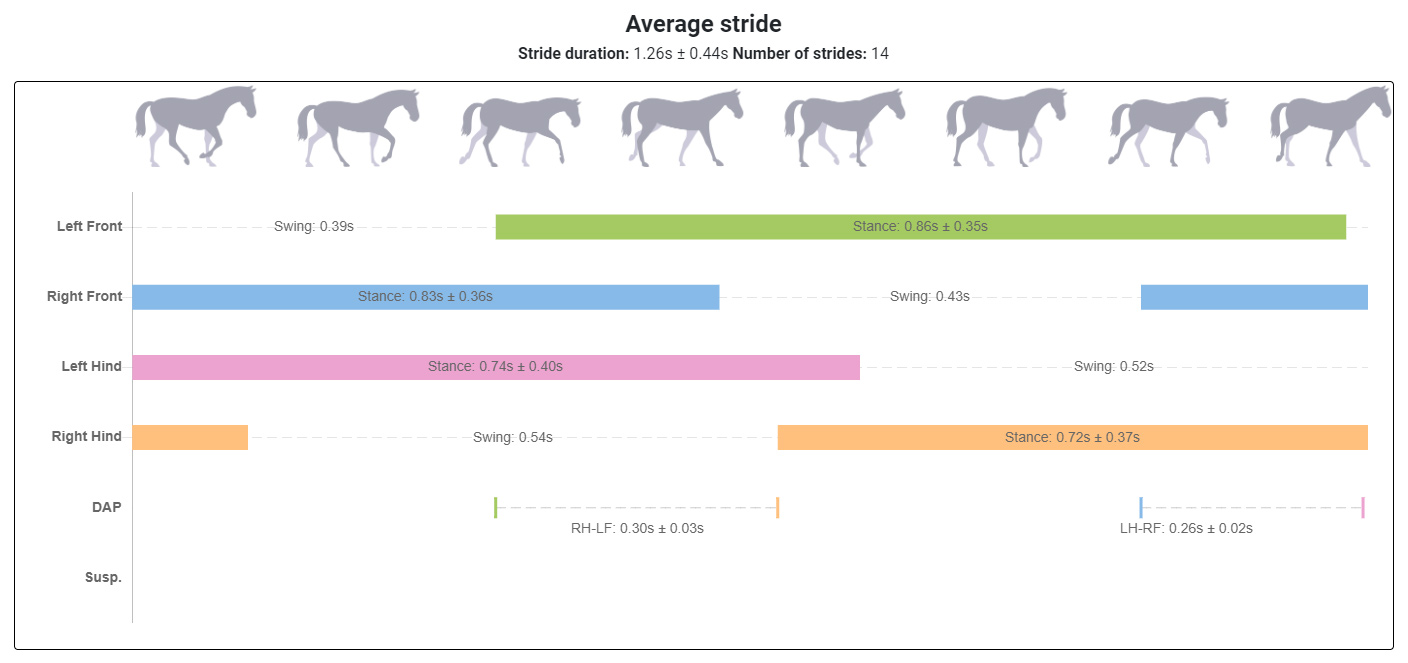
The stance duration per leg is the time in which the limb is in contact with the ground during the limb motion cycle.
The swing duration per leg is the time in which the limb is free from contact with the ground during the limb motion cycle.
Protraction & Retraction
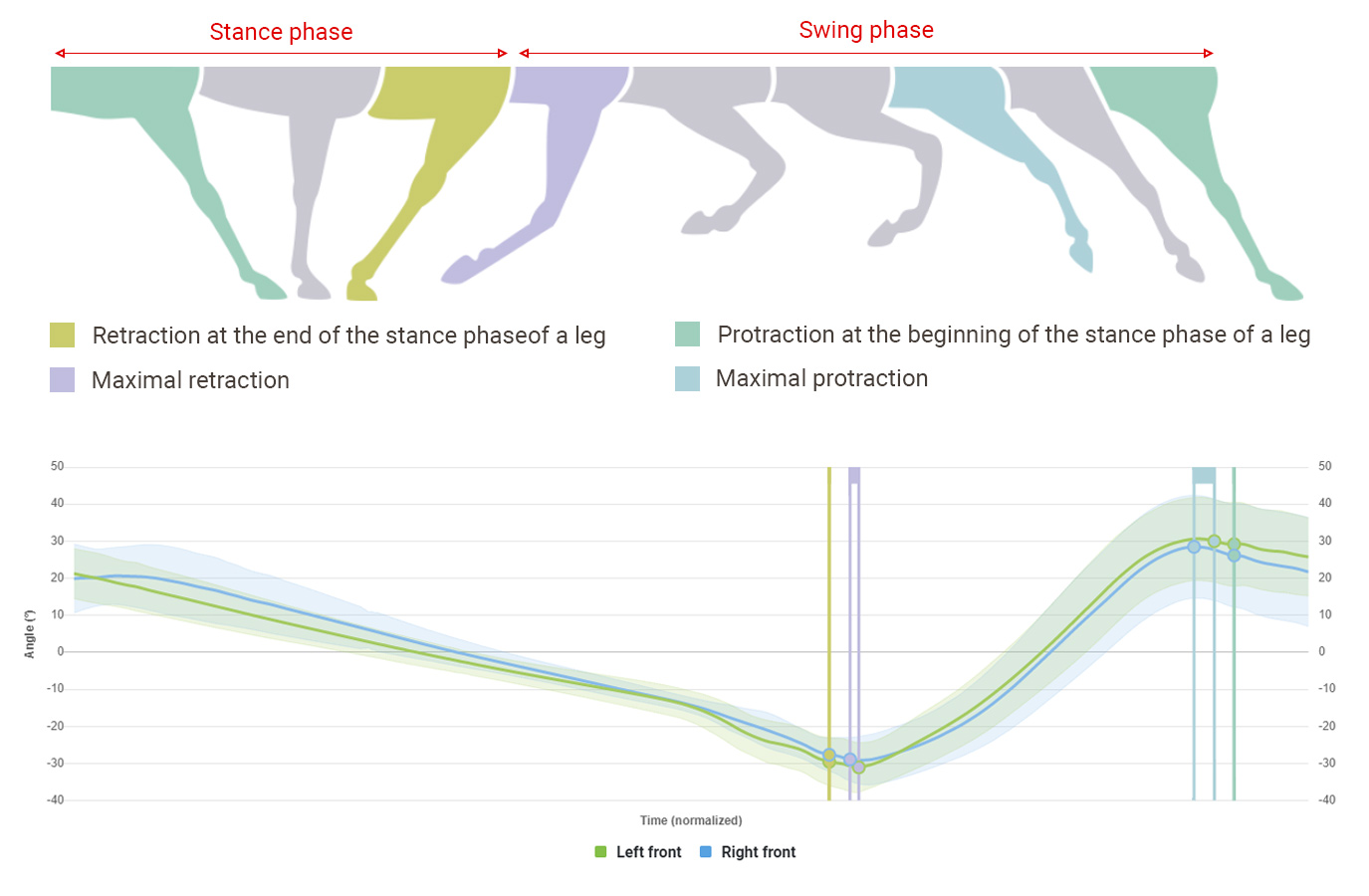
Protraction is the angle of the cannon bone moving forward (cranial).
Retraction is the angle of the cannon bone moving backward (caudal).
The following parameters are measured:
- Maximal protraction/retraction
- Retraction/Protraction at the end of the stance phase of a leg
The EquiMoves application plots the curve of one stride including protraction and retraction.
- The protraction of the leg shows the maximal protraction as an event.
- The protraction at the beginning of the stance phase of a leg is displayed in the plot as an event.
- The retraction of the leg shows the maximal retraction as an event.
- The retraction at the end of the stance phase of a leg is displayed in the plot as an event.
Duty Factor or Relative Stance Phase
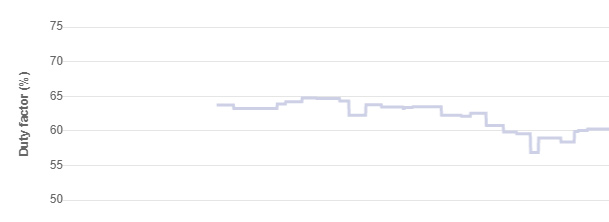
The duty factor or the relative stance phase is the average stance phase per leg divided by the stride duration. It shows the duration of the stance phase of a specified limb as a proportion of the total limb cycle duration or stride duration. In the EquiMoves application, duty factor is expressed as an average of all legs.
Abduction & Adduction
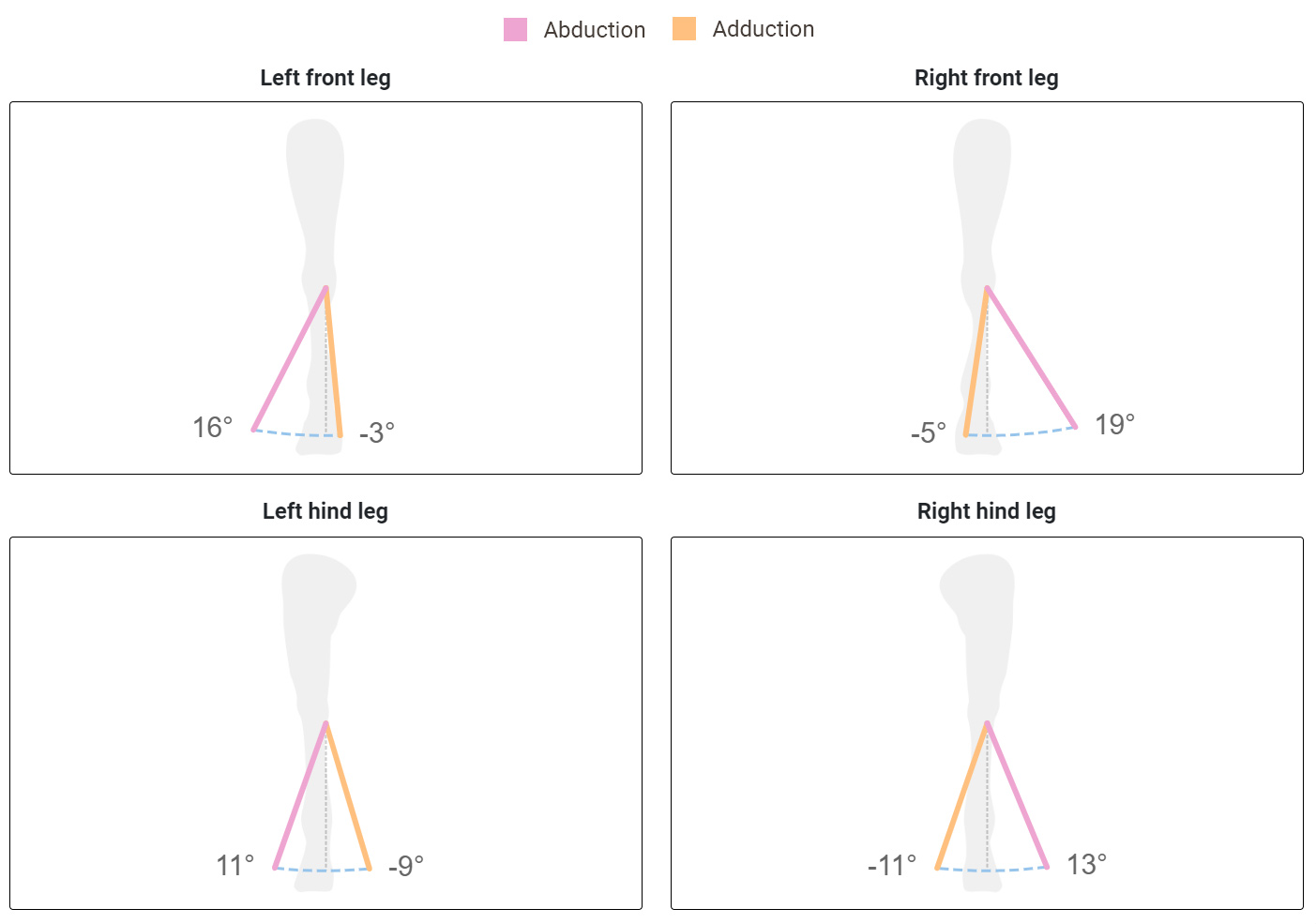
Abduction is the angle of the cannon bone moving away from the midsagittal plane.
Adduction is the angle of the cannon bone moving toward the midsagittal plane.
In the EquiMoves application, the average of a selected part of a stride is displayed as the average of maximum adduction/abduction per stride.
Performance Parameters
Speed
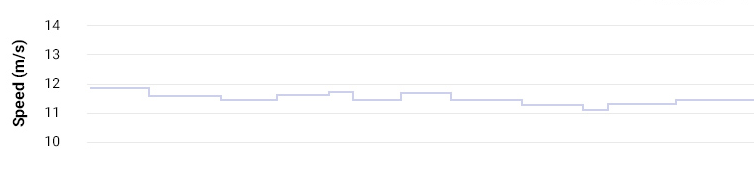
The speed of the horse (optional) is computed from a GNSS-enabled sensor. GNSS works outdoors and combines a constellation of satellites, including GPS, GLONASS, BeiDou and Galileo.
Speed information is provided in the “Speed” tab of the EquiMoves application. Average segment speed is displayed in the “Overview” tab.
Gait-Event Detection
The EquiMoves software splits the trial in different gaits and events. Events are defined as straight line or left/right circle. At the timeline of the trial, information about the gait, event, nerve-block and flexion test is given.

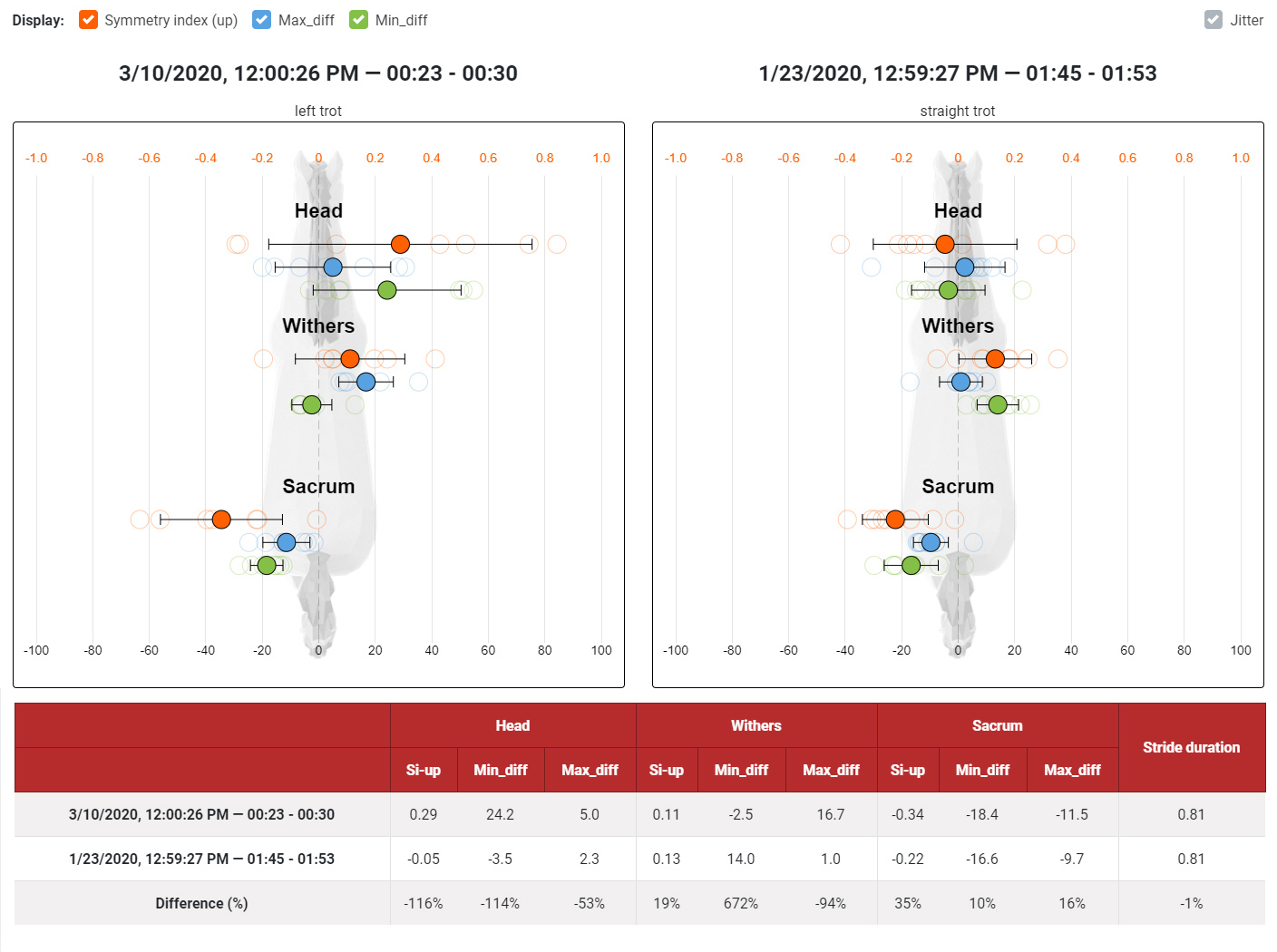
Comparison
With the EquiMoves software it is quite easy to compare different measurements of a horse. The upper body parameters and the limb-related parameters from different measurements can be compared in time.
Reports
The EquiMoves software generates a report of the measurements, split in events and gaits.
- General version: measurement summary, upper-body symmetry, timing of footfalls, protraction and retraction angles, adduction and abduction angles in trot
- Extended version: includes results for all types of examination gaits
Request more information
If you are interested in using EquiMoves in your activities please send us a message and we will be happy to give you more information.
EquiMoves in campaign about social license
In the ‘This is What Horses Do’ campaign, created by the Horse Sector Council in the Netherlands (Dutch translation: Sectorraad Paarden), attention was given to the gait patterns of horses through a lameness exam. For this study, EquiMoves… Read more →
EquiMoves used in breeding
Friesians In 2010, John Voskamp and Wim Back, nowadays board member of KFPS (Royal Friesian Studbook) initiated research using inertial sensors for the KFPS. These initial trials at Stoeterij Koningsland marked the beginning of EquiMoves’ development for analyzing… Read more →
Using Different Combinations of Body-Mounted IMU Sensors to Estimate Speed of Horses – A Machine Learning Approach
Hamed Darbandi, Filipe Serra Bragança, Berend Jan van der Zwaag, John Voskamp, Annik Imogen Gmel, Eyrún Halla Haraldsdóttir and Paul Havinga Sensors 2021, 21(3), 798; https://doi.org/10.3390/s21030798 Speed is an essential parameter in biomechanical analysis and general locomotion research.… Read more →